ADAS Simulation and Deployment Platform using Raspberry Pi
Tools: Raspberry Pi, Python, C++, Sensor Interfaces, Control Logic
Domain: Robotics, Embedded Systems, ADAS
Type: Infrastructure-first, systems-engineering project
Status: Active development — working simulation environment with ACC/AEB scenarios
GitHub Repository:
👉 https://github.com/tjaditya/adas-simulation-platform
A working laptop-based simulation environment currently supports scenario-driven execution of ACC and AEB logic with full state observability.
Project Context
Advanced Driver Assistance Systems (ADAS) are safety-critical, real-time systems that cannot be developed reliably through direct trial-and-error on physical hardware. In professional automotive and robotics workflows, control and perception algorithms are first designed, simulated, validated, and stress-tested before being deployed to embedded platforms.
This project is therefore not an attempt to rapidly build an autonomous rover, but a deliberate effort to design a development and deployment infrastructure that reflects real-world ADAS engineering practice.
The rover serves as a controlled execution platform, while the primary focus of the project is on system architecture, validation workflows, and observable system behavior, rather than feature breadth.
Project Objective
The objective of this project is to build a modular ADAS experimentation platform that enables:
- laptop-based simulation and algorithm development
- deterministic validation using mock and replayable sensor inputs
- strict separation between algorithms and hardware
- controlled, incremental deployment to embedded systems
- systematic observation, logging, and debugging of system behavior
Simulation Capabilities (Current Implementation)
A functional version of the platform is operational in the laptop-based simulation environment, enabling controlled execution of selected ADAS behaviors under predefined scenarios.
The simulation framework allows individual ADAS capabilities to be explicitly enabled or disabled, and system behavior to be observed deterministically using mocked and replayable sensor inputs.
Currently supported in simulation:
- Adaptive Cruise Control (ACC): longitudinal distance and speed regulation relative to a simulated lead object
- Autonomous Emergency Braking (AEB): collision risk evaluation and braking intervention under critical conditions
Simulation runs expose distance profiles, feature state transitions, timing effects, and priority overrides, enabling repeatable analysis of control decisions and feature interaction without exposing physical hardware to risk.
The simulation environment is intended strictly as a development and validation tool. Observed behaviors are scenario-specific and do not imply real-world robustness or safety certification. All capabilities must demonstrate stable and predictable behavior in simulation before any constrained hardware deployment is considered.
Edge-Case Scenario: Sudden Cut-In
The platform is used to examine system behavior under transient, safety-critical conditions where rapid changes in the environment require interaction between multiple ADAS features.
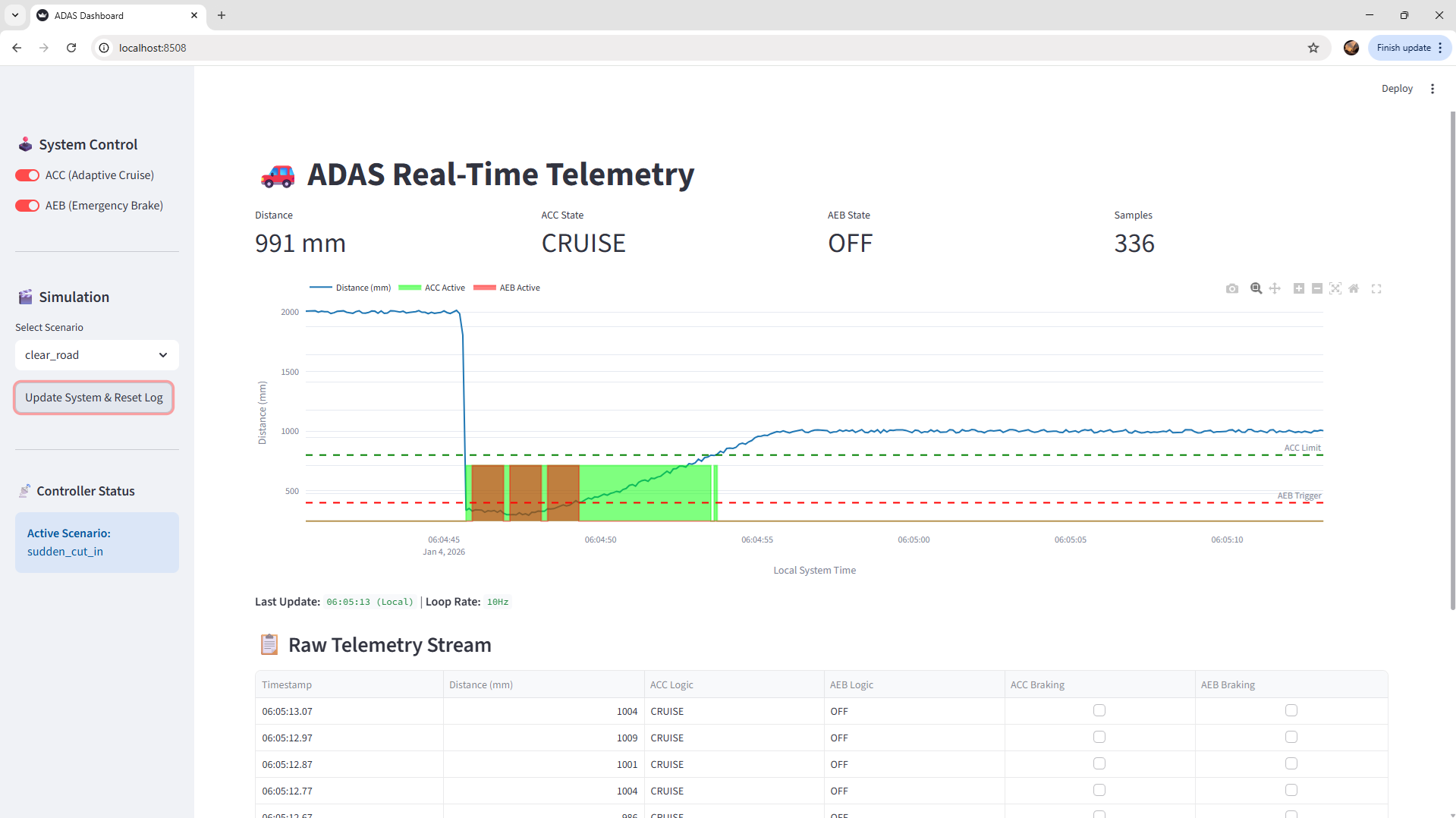
ADAS real-time telemetry dashboard during a sudden cut-in scenario, showing distance time history, ACC state transitions, and AEB trigger thresholds, with synchronized raw telemetry logging
In this scenario:
- a rapid reduction in lead-object distance is introduced through the scenario definition
- ACC transitions from cruise to slowdown as longitudinal control responds
- AEB arms and triggers intermittently when collision-risk thresholds are crossed
- priority handling ensures that emergency braking behavior overrides ACC during critical intervals
The emphasis here is on behavioral clarity, timing, and traceability, not on claiming real-world robustness.
System-Level Overview
The platform is organized around two tightly coupled execution environments that share identical logical interfaces.
Laptop-Based Development and Simulation Environment
The laptop environment is used for:
- development of perception and control algorithms
- simulation and replay of sensor data streams
- visualization, debugging, and behavioral analysis
- validation of control logic without hardware risk
All algorithms are written against hardware-agnostic interfaces, allowing identical code paths to be exercised in both simulation and embedded execution.
Embedded Execution Environment (Raspberry Pi)
The Raspberry Pi–based rover is responsible for:
- acquisition of real sensor data
- real-time control loop execution
- actuator control (motors and braking)
- enforcement of timing, safety, and priority constraints
The embedded system implements the same logical interfaces used in simulation, enabling validated algorithms to transition from laptop to hardware with minimal modification.
System Architecture
The diagram below illustrates the end-to-end architecture of the ADAS simulation and deployment platform, highlighting the separation between algorithm development, validation, and embedded execution.
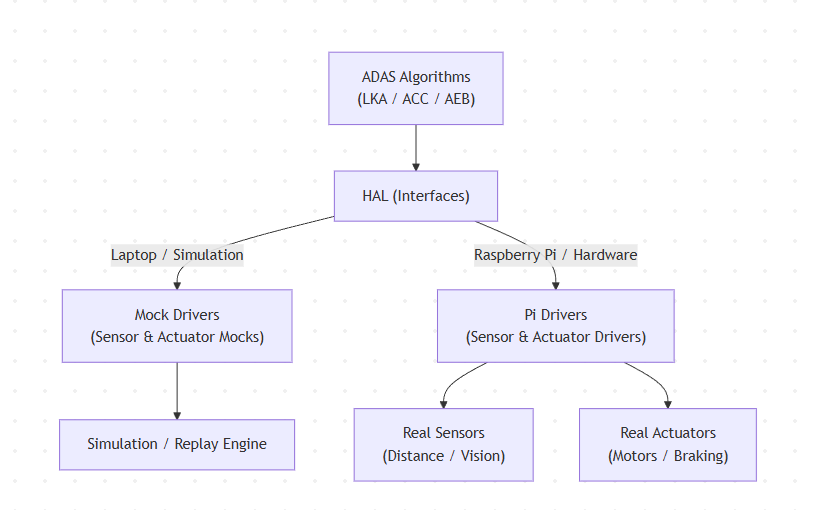
System architecture showing laptop-based simulation, hardware abstraction, and Raspberry Pi embedded execution.
Runtime Observability
The platform includes development-time observability tooling to inspect live telemetry, internal ADAS states, and feature interactions during simulation runs. This supports traceability of decisions, timing behavior, and priority handling under both steady-state and edge-case scenarios.
Development Philosophy
This project follows an infrastructure-first, safety-aware development philosophy inspired by professional ADAS workflows.
Key principles include:
- Hardware Abstraction Layer (HAL): Sensors and actuators are accessed exclusively through abstract interfaces, isolating algorithms from hardware-specific details
- Mock and Replay-Based Testing: Sensor behavior can be simulated or replayed from recorded data to enable deterministic, repeatable testing
- Validation Before Deployment: Algorithms must demonstrate stable and predictable behavior in simulation before interacting with physical hardware
- Incremental Capability Enablement: Only one ADAS capability is introduced at a time to control system complexity and reduce risk
Target ADAS Capabilities (Planned)
Lane Keeping Assist (LKA) (architecture defined; implementation pending)
- Lane detection and estimation
- Steering correction logic
- Stability under varying inputs
Adaptive Cruise Control (ACC)
- Distance and relative speed estimation
- Longitudinal speed control
- Smooth response to changing lead-object behavior
Autonomous Emergency Braking (AEB)
- Collision risk estimation
- Decision thresholds and braking logic
- Highest-priority override behavior
Incremental Development Stages
Stage 1 – Platform Bring-Up (Complete)
- Raspberry Pi setup and remote access
- Validation of GPIO, motor drivers, and basic actuation
- Initial sensor communication tests
Stage 2 – Simulation and Replay Pipeline (Complete for ACC/AEB)
- Mock sensor interfaces for laptop execution
- Recorded data playback for repeatable validation
- Algorithm verification independent of hardware
Stage 3 – Single-Feature Deployment (Planned)
- Deployment of one ADAS capability at a time
- Low-speed, constrained hardware testing
- Logging and behavioral verification
Stage 4 – Multi-Feature Integration (Planned)
- Priority handling (e.g., AEB overriding ACC)
- Interaction between perception and control layers
-
System-level testing and refinement
Tooling and Technology Choices
- Raspberry Pi as the embedded execution platform
- Python and C++ for algorithm and control logic
- Distance and vision sensors (planned)
- Simulation, replay, and scenario tooling for validation
- Data logging and visualization tools
Technology choices favor transparency, debuggability, and iteration speed over performance optimization.
Development Notes
AI-assisted coding tools were used selectively for visualization and UI scaffolding. All system architecture, control logic, state handling, and scenario definitions were designed and reviewed manually, with AI output treated as a productivity aid rather than an author.
Engineering Value and Learning Outcomes
This project demonstrates:
- systems-level thinking in robotics and ADAS
- safety-aware, validation-driven development practices
- disciplined separation between software logic and hardware execution
- controlled, incremental integration of complex features
- understanding of how real-world ADAS systems are engineered and validated